Merlett:
A struggling creature
This project asks the question "What if an ordinary, industrial material could feel alive and evoke human care, empathy, and unease?"'. Merlett, is an ordinary plastic vent tube transformed into an interactive, shape changing entity, evoking negative emotions to engage users. Merlett portrays an uncanny and vulnerable creature that seems to struggle or reach out for care by responding to touch with sound and movement. It raises questions about how humans relate to materials and machines, and how design can foster empathy in unexpected ways, prompting visitors to questions their instincts of care, empathy and unease.
Project conducted for the Master course "Interactive Materiality"
Duration: 3 months
Designers: Hanna Loschacoff, Isa Jansen and Stefan Hubbert
Technology:
-
ESP32 microcontroller + capacitive touch sensor + servo motors + speakers
-
Live automation to Ableton via a sound interface
-
Rotary to linear mechanisms



Final design
Video made for the Dutch Design Week 2025 4TU exhibition
Videography Credits:
Direction & Editing : Marica De Michele
Director of Photography : Jurica Marković
Music : Ivna Jurković
Production Assistant : Clara Gustafsson

Photography Credits:
Sem Jordaan

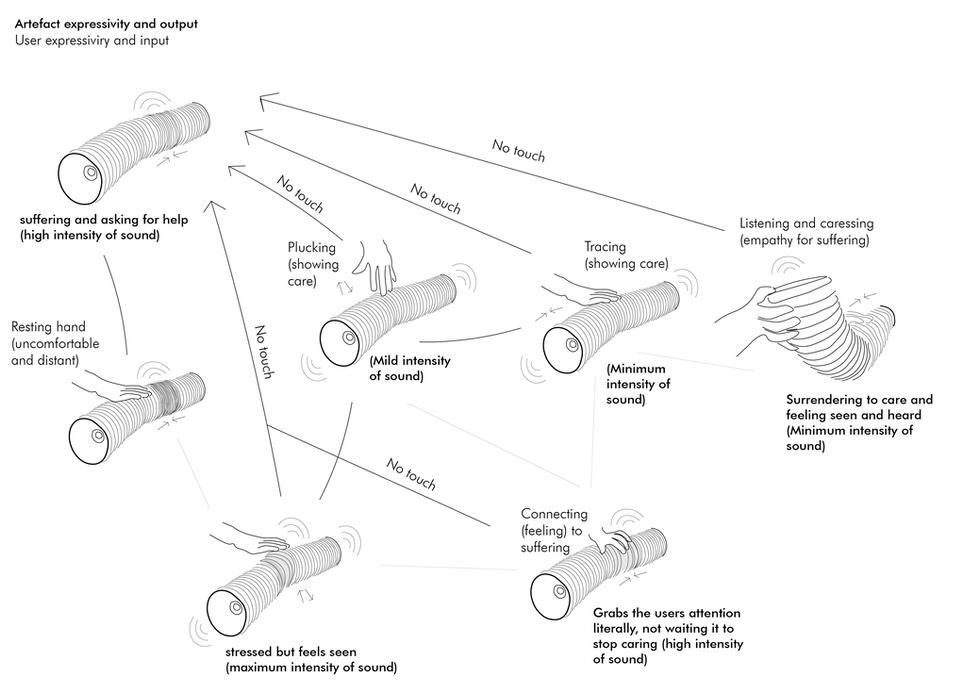
Interaction Loop and Expressivity
Process
01
Methodology: Material Driven Design (Research through Design)
Starting point: Choosing the material transition of Contraction to Expansion
Material explorations of contraction and expansion

Mood board: mechanisms research and movement exploration
Material exploration: Making mechanisms, translating material qualities, aesthetic and sound explorations
Manipulating and recreating the material properties of the chosen material using 3D printing

Iteration 1

This initial iteration tested the using a capacitive sensor and using the conductivity of the aluminum tube to sense touch.
Additionally, using nylon threads the material should expand and contract powered by servo motors. This resulted in a breathing movement.
Initial interaction:
Side touched moves away from user and when both sides are touched the show materials breaths fast.
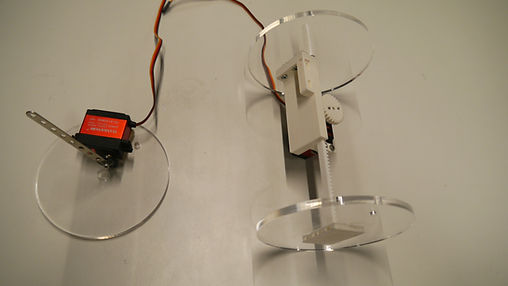
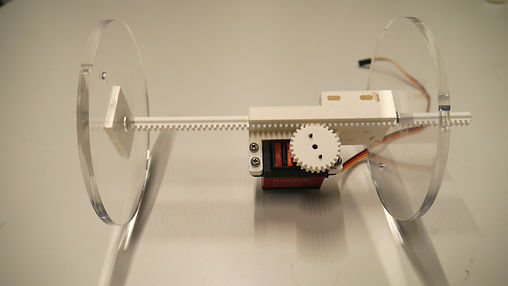
Iteration 2
Using nylon threads to fake the actuation, the possible interactions with the material were explored. Keeping in mind the possible states of the system.
Using servo motors two movements were actuated to explore what the expressivity of each movement is. The mechanisms which allow for rotary to linear movement were explored by placing discs in the tube and using a rack and pinion system.
Iteration 3
Switching to the plastic variation of the material the selected breathing movements were actuated. The conductive qualities of the continuous metal wire within the tube were used in combination with a capacitive sensor to detect interaction. We could also detect if someone was hovering their hand above the tube before touching it.
When passing current through the metal wire a coil with both a electric and magnetic field is generated. Since humans are conductive to electricity we can detect differences in capacitance,
02
Choice: Using the vent tube as the material
Exploring and designing interactions and emotional expressivity
Realizing desired movement, sensing and actuation using Arduino microcontroller, a capacitive sensor, two servo motors and a rotary to linear mechanism

03
Prototyping final design


Cutting and shaping metal into a horn shape
Soldering electronics
Coding desired interaction loop
